 22/06/15
22/06/15Регистрация света вне фокуса — сложная задача для получения чётких высококонтрастных изображений во многих приложениях визуализации. Цифровая сканирующая световая микроскопия (DSLM) предлагает эффективный способ уменьшения захвата света вне фокуса за счёт синхронизации освещения с «скользящим затвором» современных КМОП-камер. Однако такая точная синхронизация требует полного контроля над работой «скользящего затвора» камеры — функции, предлагаемой камерами Tucsen с режимом управления «скользящим затвором».
Что такое рольставни?
Затвор — это часть камеры, которая запускает и останавливает экспозицию. Раньше в научных камерах использовались механические затворы, которые открывались для экспонирования изображения и закрывались для завершения экспозиции. Механические затворы были медленными и при длительном использовании были подвержены проблемам с надёжностью. Теперь в научных камерах используются электронные затворы, которые значительно быстрее, проще и универсальнее.
Камеры с подвижным затвором начинают захват изображения с верхней части сенсора и «прокручивают» его вниз, строка за строкой, до нижней части сенсора. Этот захват включает три процесса: сброс сигнала, экспозицию и считывание.
Экспонирование каждой строки начинается со сброса полученного сигнала каждого пикселя. По истечении заданного времени экспозиции для верхней строки считывание, отмечающее окончание сбора данных, спускается вниз аналогичным образом. В результате остаётся область активных пикселей, простирающаяся от верха до низа камеры, высота которой определяется длительностью экспозиции. При работе камеры на полной скорости задержка на строку обычно составляет от 5 до 25 микросекунд на строку пикселей, в зависимости от скорости камеры.
Чтобы использовать преимущества оптических технологий, требующих синхронизации сканирования подсветки и работы роллингового затвора камеры, эта задержка обычно слишком коротка, из-за чего роллинговый затвор срабатывает слишком быстро, и другое оборудование не успевает за ним. Именно здесь на помощь приходит режим управления роллинговым затвором.
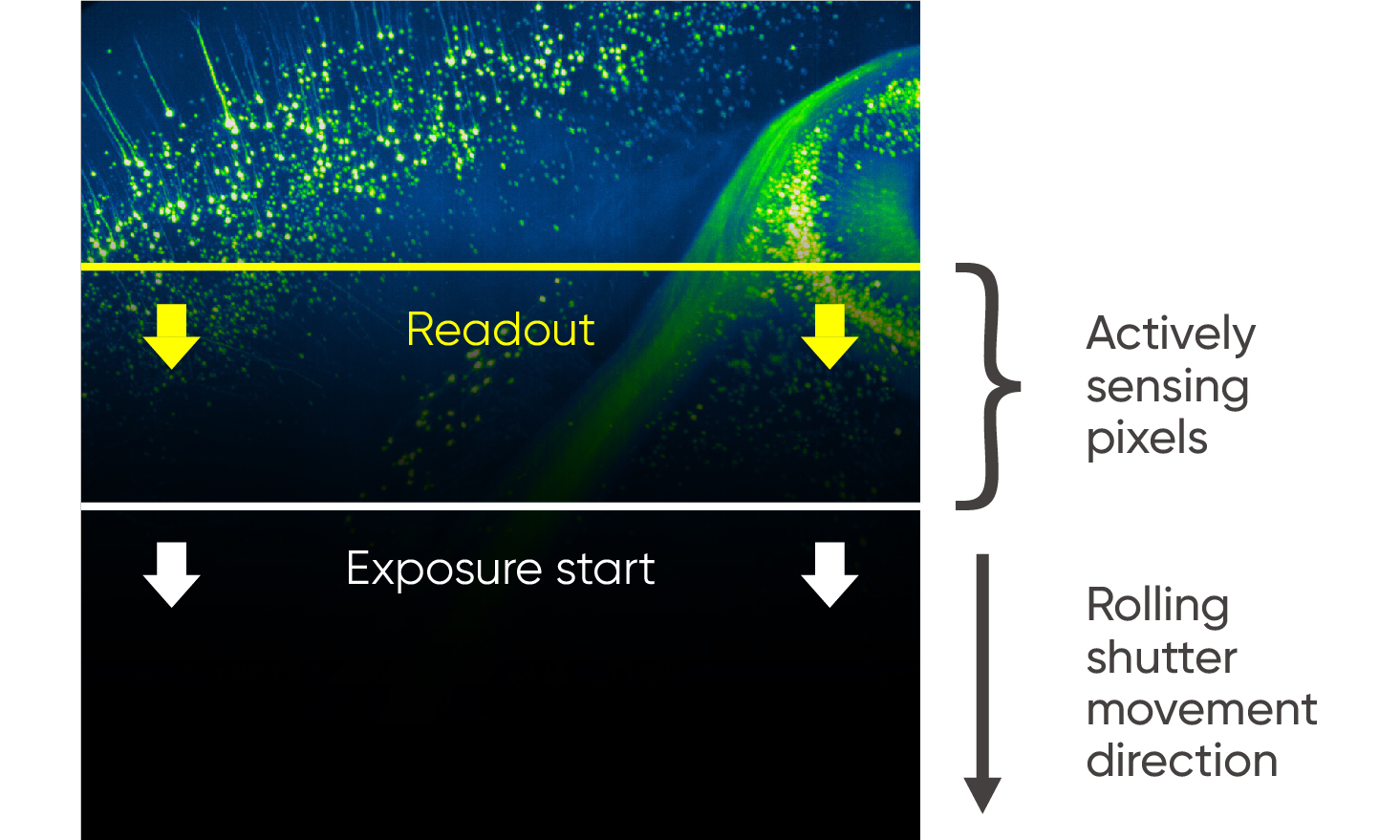
Рисунок 1: Принципиальная схема работы рольставней
Как работает режим управления рольставнями
Благодаря встроенному интеллектуальному механизму камер Tucsen работа скользящего затвора камеры может быть точно настроена для синхронизации с внешним оборудованием. Добавляя небольшую дополнительную задержку между сбросом и считыванием каждой строки, можно контролировать время, необходимое активной области пикселя для перемещения по сенсору, обеспечивая такую синхронизацию.
Кроме того, можно точно настроить «высоту щели» сканируемой активной области. Более длительное время экспозиции или более короткие временные задержки строк приводят к увеличению высоты щели. В случае DSLM это можно использовать для сопоставления только освещённой области образца, обеспечивая баланс между экспонированием пикселей в течение максимально возможного времени для эффективного захвата сигнала и минимизацией нефокусированного света.
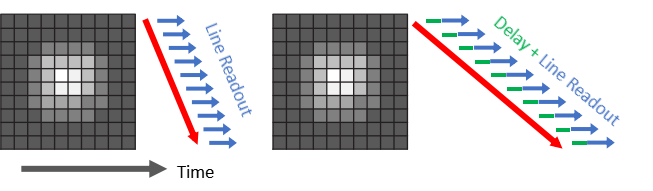
Фигура2: Слева: Схема работы скользящего затвора на полной скорости камеры. Справа: Схема, показывающая скорость скользящего затвора в режиме управления скользящим затвором, добавляющем дополнительную задержку между строками для синхронизации с другим оборудованием.
Благодаря этой дополнительной задержке теперь необходимо понимать три важные переменные, которые определяют работу вращающегося затвора: высоту области «активных» пикселей и скорость их перемещения по сенсору.
Время в очереди: это время по умолчанию, необходимое датчику для считывания одной строки и перехода к следующей. Оно определяет собственную «скорость» датчика камеры и может быть задано в программном обеспечении камеры или приблизительно рассчитано для заданной области интереса (ROI) и режима камеры следующим образом:

Где «Максимальная частота кадров камеры» относится к частоте кадров, не ограниченной ни длительностью выдержки, ни частотой внешнего срабатывания.
Время контакта:Это определяет, как долго каждая строка пикселей активна, тем самым определяя высоту активной области для заданного времени строки и времени задержки.
Задержка времени линии:Вот какая дополнительная задержка добавляется в режиме управления роллинговыми затворами. Режим управления роллинговыми затворами позволяет добавлять задержку.в целых числах, кратных времени линии. Например, если время строки для камеры составляет 10 микросекунд, дополнительная задержка на строку составляет 1, 2,…можно суммировать до 8928, указывая число, кратное 10 микросекундам.
Также важна высота используемой области интереса (ROI), поскольку она определяет количество строк, которые должна пройти активная область перед сбросом.
Режимы синхронизации управления рулонными шторами
Режим управления рольставнями имеет два режима работы в зависимости от того, какой параметр важнее для управления.
In Режим задержки времени линии, вы можете установить время задержки, как указано выше. После этого программное обеспечение сможет определить для указанного вами времени экспозиции итоговую высоту щели (высоту активных пикселей в роллинг-затворе).
In Активный пиксель / Высота щелиВ этом режиме вы можете задать количество рядов сенсора, которые будут активны при движении роллингового затвора. Указанное время экспозиции будет использовано для расчета необходимой задержки линии для автоматического достижения заданной высоты щели.
Настройка режима управления рольставнями в программном обеспечении
Управление режимом работы (состоянием)
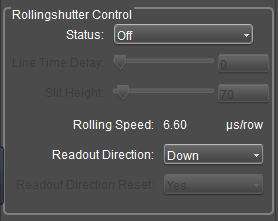
Рисунок 3: Пример интерфейса для управления режимом управления рольставнями в программе Tucsen Mosaic. Все параметры доступно через Micro-Manager и SDK.
Доступны три статуса (режима работы):Off, Задержка времени линии, Высота щели.
• При установке наВыключенный, датчик ведет себя как обычно, без добавления дополнительной задержки.
• При установке наЗадержка времени линиирежиме вы можете указать задержку времени линии в единицах времени линии, как описано выше.
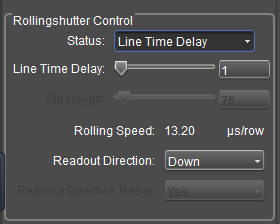
Рисунок 4: Параметры программного обеспечения для временной задержки линии. ПримерИнтерфейс программного обеспечения Tucsen Mosaic. Все опции доступны через Micro-Manager и SDK.
Количество циклов времени строки, которые можно добавить к настраиваемой задержке, варьируется в зависимости от камеры. Новое время строки камеры после добавления задержки составит:
Интервал времени в линии = время в линии(датчик)+(Время ожидания в очереди(датчик)× Задержка времени линии)
Значение параметраСкорость каченияравноИнтервал времени линии.
Тогда общее время считывания изображения составит:
Rголовавремя(изображение)= Интервал времени линии×Nряды.
Nряды— общее количество строк пикселей изображения в интересующей области. Частота кадров при съемке в этом режиме зависит от количества отображаемых строк и времени цикла строки:
Частота кадров = 1/(Время считывания)(изображение)+ Время экспозиции)
•При установке наВысота щели mоде, вы можете установитьразмер активной сканируемой области, определяемый как tКоличество строк пикселей между сигналом «сброс» и сигналом «считывание».Диапазон значений высоты щели в пикселях составляет от 1 до 2048. Чтобы перевести это значение в физический размер, умножьте его на размер пикселя из спецификации камеры.
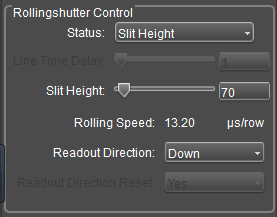
Рисунок 5: Параметры управления режимом высоты щели. ПримерИнтерфейс программного обеспечения Tucsen Mosaic. Все опции доступны через Micro-Manager и SDK.
Программное обеспечение автоматически рассчитает требуемую задержку времени линии и интервал времени линии по следующей формуле:
Задержка времени линии = Время экспозиции(Линии)/ Высота щели(Линии)
В высокоскоростном режиме (режиме усиления камеры) диапазон высоты щели может быть установлен только чётным числом, поскольку в этом режиме строки считываются попарно. Параметры в высокоскоростном режиме рассчитываются следующим образом.
Задержка времени линии = Время экспозиции(Линии)/ Высота ½щели(Линии)
Высота щели = (Время контакта(Линии)÷ Задержка времени линии)×2
Управление направлением сканирования
Существует три варианта направления движения рольставней:
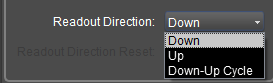
DсобственныйНаправление сканирования вниз используется по умолчанию для камер sCMOS. Сканирование по принципу «сверху вниз» начинается с первого ряда в верхней части матрицы и продолжается до последнего ряда внизу. Получение каждого последующего кадра начинается с первого ряда в верхней части.
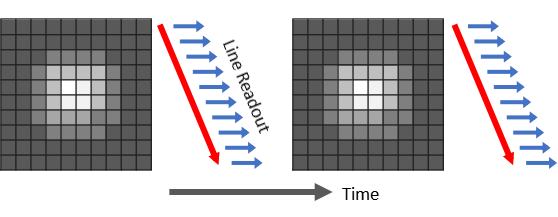
Рисунок 6: Схема режима нисходящего сканирования
Up:В режиме сканирования вверх роллинг-затвор начинает сканирование с нижней строки и сканирует до верхней строки первой строки. Получение каждого последующего кадра начинается с нижней строки. Несмотря на то, что порядок записи данных на камеру теперь обратен, результирующее изображение, передаваемое в программу, по-прежнему будет иметь исходную ориентацию, то есть изображение не будет перевернуто по вертикали относительно режима сканирования вниз.
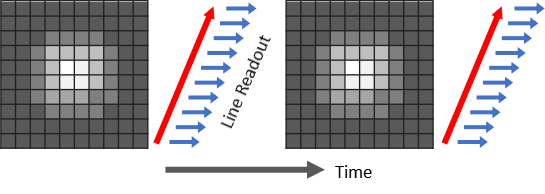
Рисунок 7: Схема режима сканирования вверх
Цикл «вниз-вверх»При попеременном сканировании вверх и вниз роллинговый затвор начинается с первого ряда сверху и продолжается до последнего ряда снизу. Для следующего кадра роллинговый затвор начинается с нижнего ряда и сканирует до верхнего ряда и т. д. Ориентация изображения, полученного в этом режиме, совпадает с ориентацией при сканировании вниз.

Рисунок 8: Схема режима сканирования цикла «вниз-вверх»
• РeaСброс направления dout
Эта функция доступна только в режиме «Цикл вниз-вверх».
Значение этого параметра по умолчанию — «Да», что гарантирует, что первый кадр каждой новой последовательности захвата будет начинаться с самой верхней строки и сканироваться сверху вниз.
Если этому параметру задано значение «Нет», первый кадр каждого нового захвата будет начинаться с позиции последнего кадра предыдущей последовательности. Если последний кадр заканчивается в нижней строке, первый кадр последующих захватов будет начинаться в нижней строке и распространяться вверх.











